Hi, I am Dickson. I am a 2nd year M.Phil. student in the T Stone Robotics Institute at The Chinese University of Hong Kong, advised by Professor Liu, Yun-Hui and Professor Wang, Zerui. My research interests are soft robotics, medical robotics, and robot hardware designing. Prior to my M.Phil. studies, I received my B.Eng. in Mechanical engineering at The University of Hong Kong.
You can find the detailed information about me in my Curriculum Vita.
Engineering Portfolio
A Reconfigurable Variable Stiffness Manipulator by a Sliding Layer Mechanism
Responsibility: Reconfigurable Variable Stiffness Manipulator (Mechanical design, Model, Control)
Descriptions:
•Achieve a variable stiffness and shift the stiffening regions
•It consists of two mechanisms: honeycomb jamming mechanism and sliding layer mechanism
•The variable stiffness mechanism is achieved by jamming between a honeycomb core and jamming layers
•The sliding layer mechanism reconfigures the robot via sliding the jamming layer strips

Publications:
D. C. F. Li, Z. Wang, and Y. Liu, "Honeycomb Jamming: an Enabling Technology of Variable Stiffness Reconfiguration," Soft Robotics, 2019 (Under Review)
D. C. F. Li, Z. Wang, B. Ouyang, and Y. Liu, "A Reconfigurable Variable Stiffness Manipulator by a Sliding Layer Mechanism," 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 2019, pp. 3976-3982.doi: 10.1109/ICRA.2019.8793571
Endoscope Manipulator for Sinus Surgery
Responsibility: Endoscope Manipulator for Sinus Surgery
(Modifications on Mechanical design, manufacturing, assembling)
Descriptions:
•Manipulate the endoscope camera to reduce the workload of the surgeons
•The 6-degree of freedom passive joints are designed for manual set-up of the robot before surgery
•The 3 active joints control the view of the camera with the remote center of motion mechanism

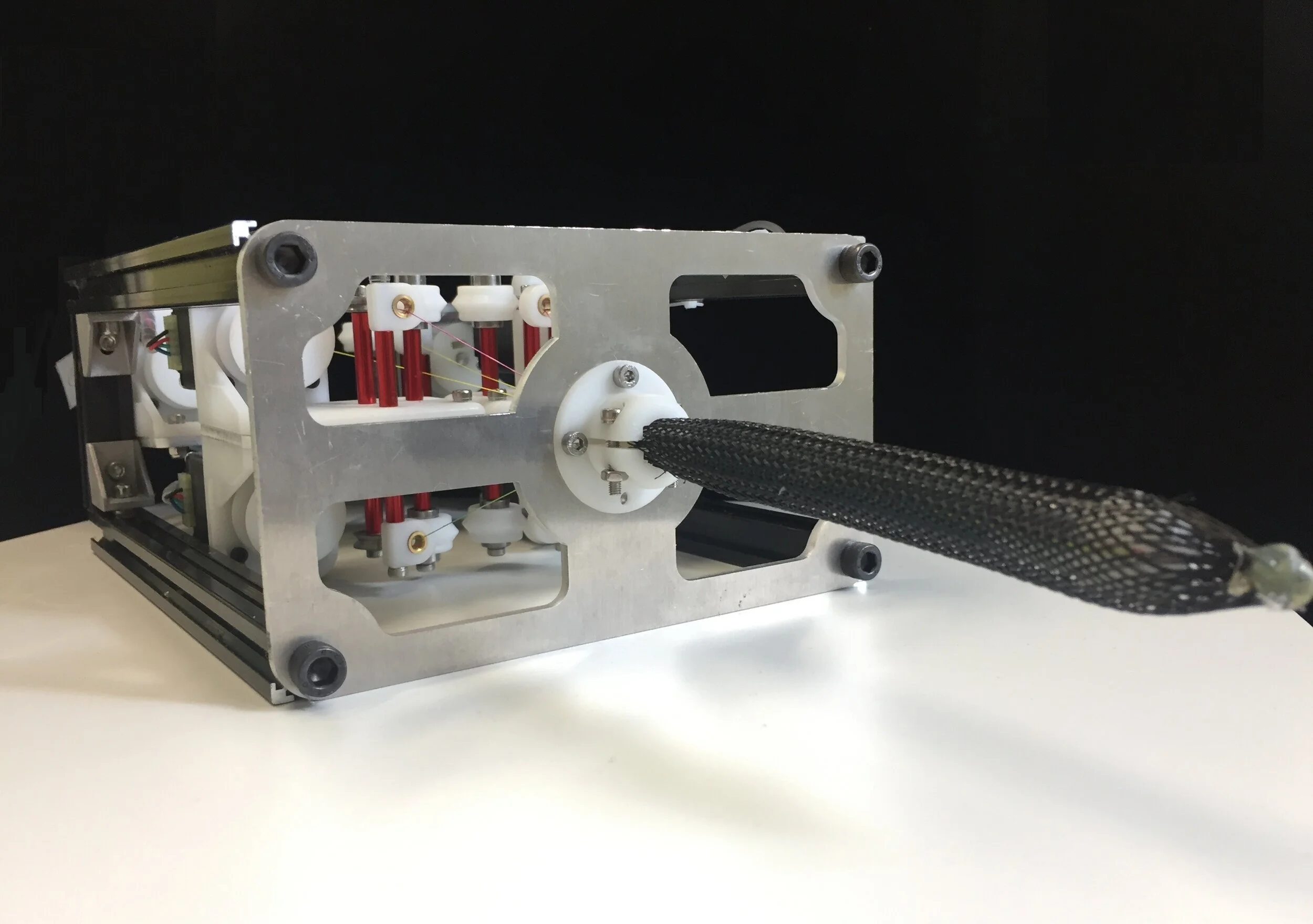
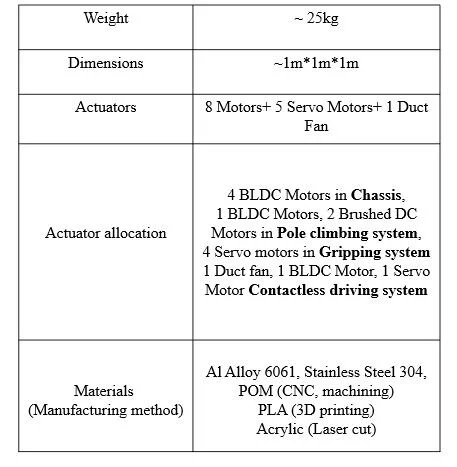
Contactless Driving Robot and Pole Climbing Robot
(Hybrid Robot)

Responsibility: Hybrid Robot (Mechanical design)
Descriptions:
•Consist of 4 systems: Chassis, Contactless driving system, gripping system, and pole climbing system
•Chassis: holonomic drive (Omni-wheel)
•Contactless driving system: driving another robot by thrust from duct fan with the visual tracking system
•Gripping system: grip with auto centring mechanism to deliver object from another robot to the top of a pole
•Pole climbing system: climb a PVC pole with 50mm-diameter

Multi-functional Child Robot
Responsibility: Child Robot(Mechanical design)
Descriptions:
•Consist of different component: duct fan, ladder guide, locking mechanism, and gripping mechanism
•Swing in swing seat driven by thrust from the fan
•Climb up the ladder driven by thrust from the fan
Torus-shaped Mechanical Gripper
Responsibility: Gripper (Mechanical design)
Descriptions:
•Grasp objects which different geometries (universal gripper)
•Controlled by a pneumatic cylinder
•Manufactured by 3D printing (PLA), with a torus-shaped channel
Industrial Pipe Spraying Robot
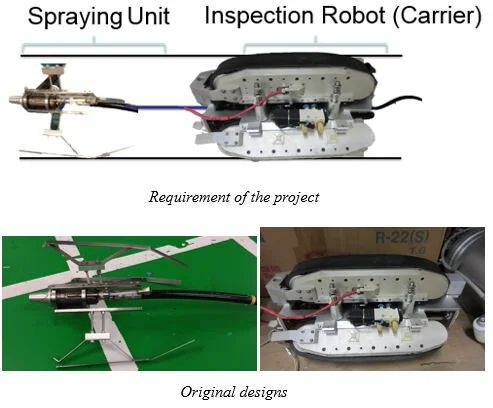
Responsibility: Spraying Unit (Mechanical design), Pipe inspection robot (Control and electronics )
Descriptions:
•Deliver a spraying unit along the pipe in a constant speed
•It is an industrial pipe inspection robot originating from a project cooperated with Town gas Inc.
•Initially, the inspection robot was controlled by switches, and spraying unit was supported by sled

Modifications :
•An external wheel encoder was added
•An electronic and control system was set up
•The mechanical design of the spray unit was modified to ensure smooth propagation